Week 10:Docker 概念与 OpenCV 实验
本周继续学习 Docker,并开始使用 OpenCV 进行图像处理实验。课程目标是理解图像在程序中如何读取、显示、转换和保存,为后续 ArUco 标记识别和机器人视觉测距做准备。
实验内容
- 在 Docker 或本地 Python 环境中安装 OpenCV。
- 使用
cv2.imread()读取图片。 - 将彩色图像转换为灰度图。
- 使用
cv2.imshow()或保存文件观察处理结果。 - 对比原图、灰度图和处理后的图像效果。
代码说明
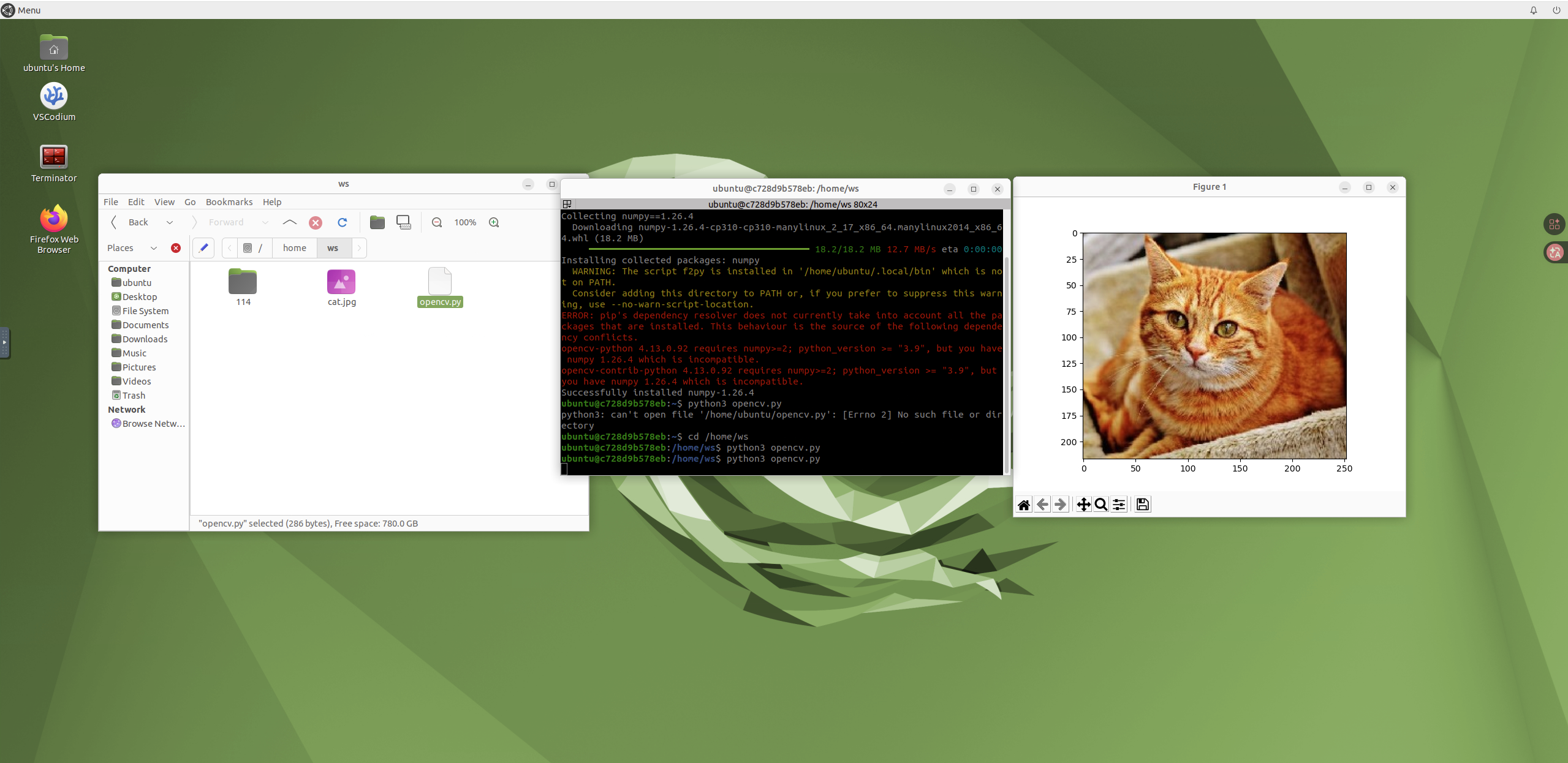
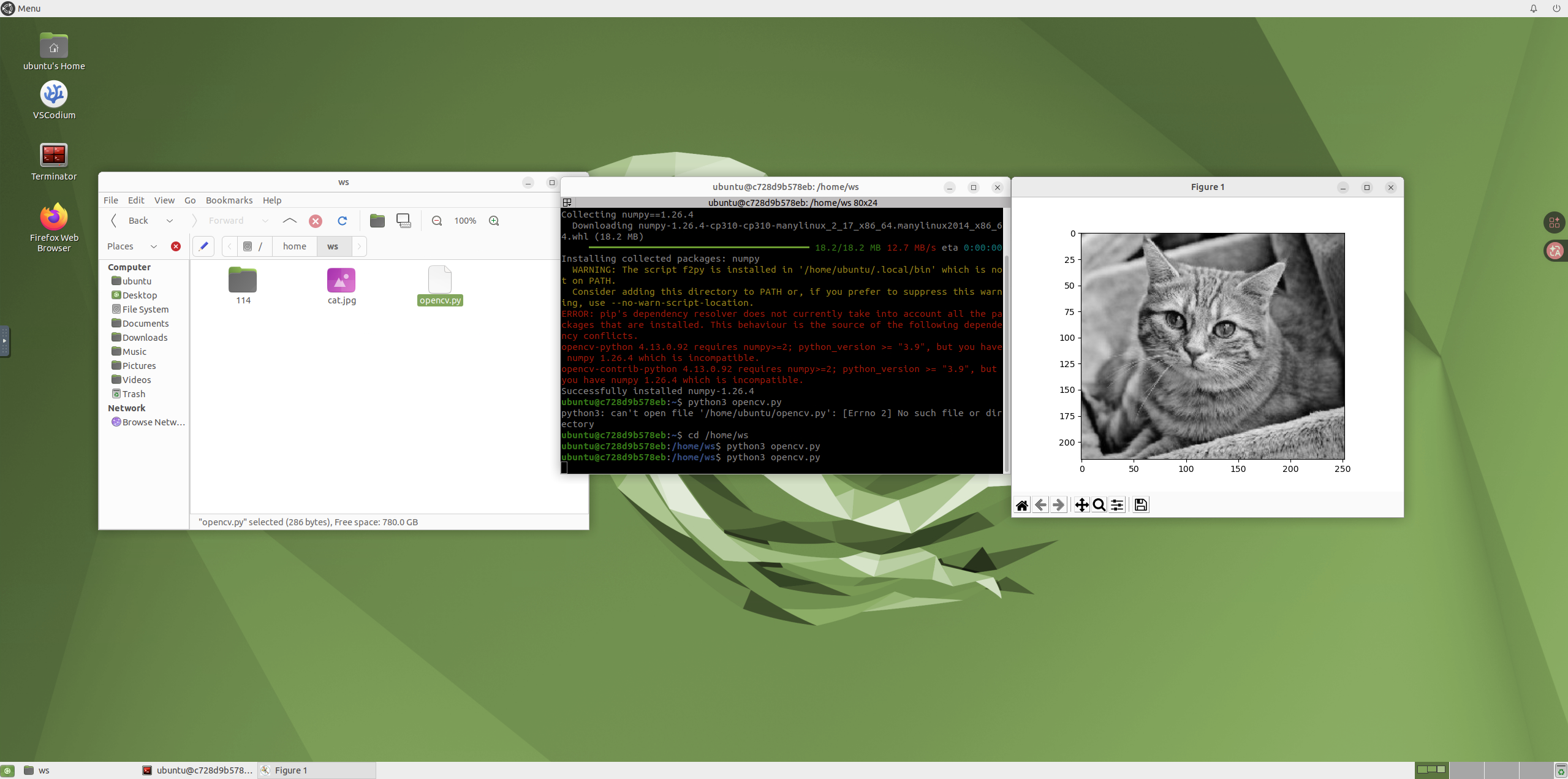
opencv.py 是本周主要代码文件,读取 cat.jpg 并进行基础图像处理。核心代码如下:
import cv2
img_basic = cv2.imread("cat.jpg", cv2.IMREAD_COLOR)
img_gray = cv2.cvtColor(img_basic, cv2.COLOR_BGR2GRAY)
cv2.imwrite("gray_output.jpg", img_gray)
运行方式:
python3 opencv.py
如果在无图形界面的环境中运行,建议把显示窗口相关代码改为保存图片文件,再通过文件查看结果。
运行截图
课程内容摘要
本周把 Docker 概念与 OpenCV 图像处理结合起来。Docker 负责提供稳定环境,OpenCV 负责完成图像读取、颜色空间转换、保存和显示。机器人视觉任务往往从最基础的图像输入开始,再逐步进入目标检测、标记识别、测距和导航。本周作业中的 opencv.py 虽然简短,但包含了完整处理链路:读取原图、转换灰度图、输出结果并截图记录。这样的流程为 Week12 的手机摄像头和 ArUco 实验做了直接铺垫。
学习总结
OpenCV 是机器人视觉任务中非常重要的工具。本周实验虽然只是读取和转换图片,但它展示了图像处理程序的基本结构:输入图像、处理图像、输出结果。后续 ArUco 识别、摄像头接入和自动导航都需要类似的处理流程。Docker 则保证这些图像处理依赖可以在稳定环境中运行。