Week 12:手机摄像头、ArUco 识别与距离测量
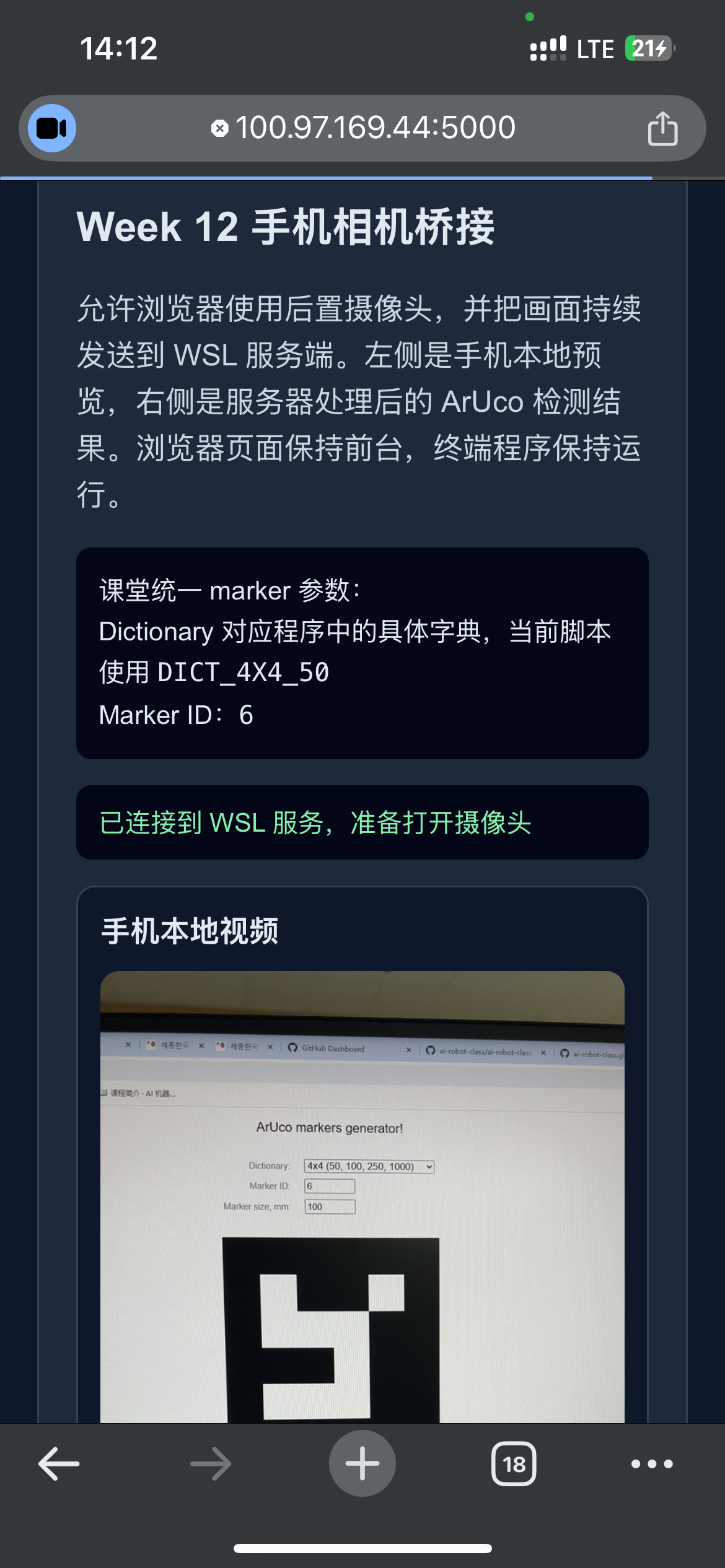
本周任务是把手机摄像头画面接入电脑端程序,并使用 OpenCV 识别 ArUco 标记,进一步估计目标距离。实验重点是理解“手机作为传感器”的工程链路:手机采集图像,通过局域网或 Tailscale 发送到电脑,电脑端 Flask 服务接收图像并进行视觉处理。
完成内容
- 编写并整理
camera_bridge.py,提供网页端摄像头上传和服务端预览功能。 - 使用 OpenCV 处理上传图像,为 ArUco 标记检测和距离估计做准备。
- 保存运行截图
img12-1.jpg与img12-2.jpg,展示手机摄像头接入和网页预览效果。 - 记录依赖文件
requirements.txt,便于在新环境中安装 Flask、OpenCV 等库。
运行方式
安装依赖:
pip install -r requirements.txt
启动桥接程序:
python3 camera_bridge.py
然后在手机和电脑处于同一网络或同一 Tailscale 网络时,使用手机浏览器访问服务器地址。网页会调用手机摄像头并把画面上传到服务端,服务端可以显示预览、保存图片并继续做 ArUco 识别。
运行截图
代码说明
camera_bridge.py 的核心职责包括:
- 提供浏览器页面,让手机端可以打开摄像头。
- 接收前端上传的图像帧。
- 使用 OpenCV 解码图像。
- 提供
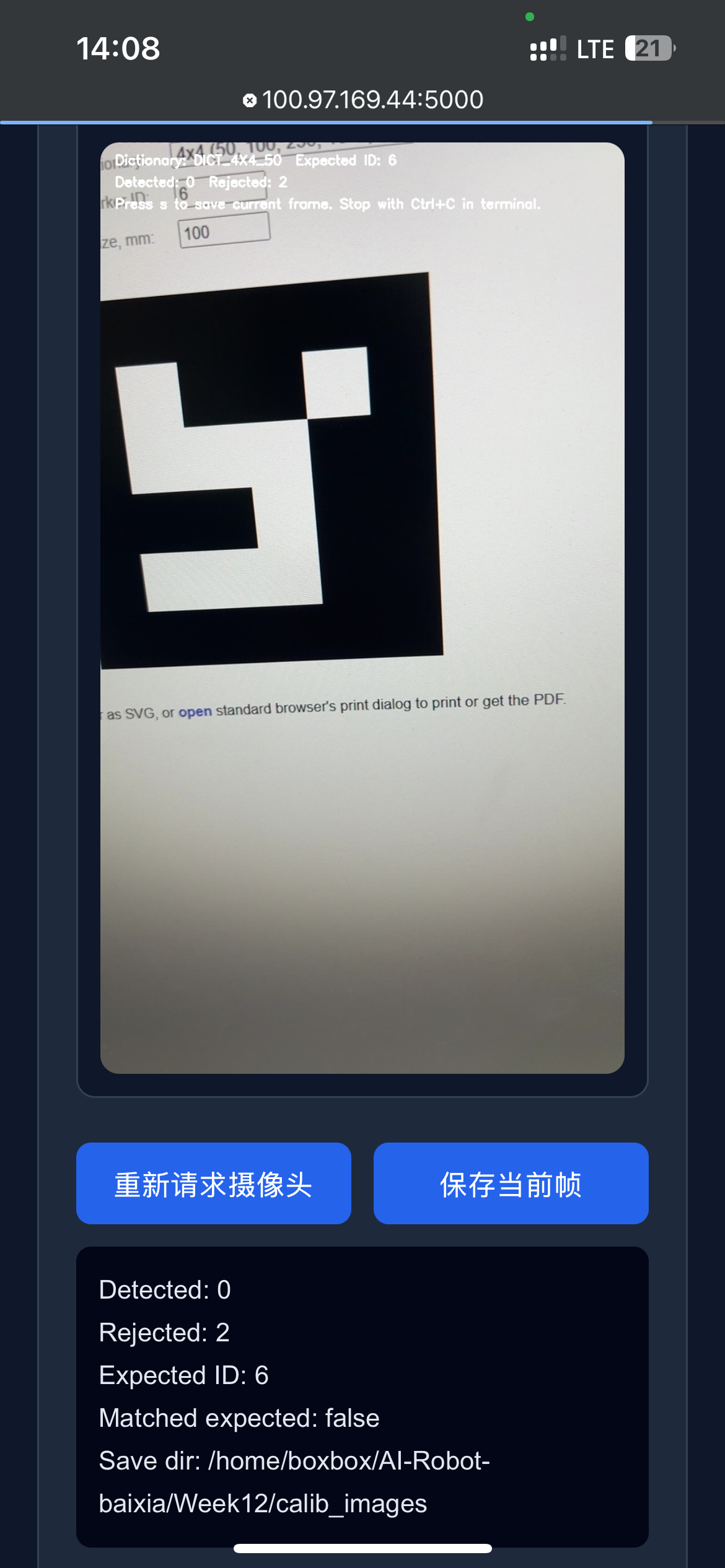
/preview.jpg接口显示服务端最新画面。 - 保存关键帧,便于调试 ArUco 标记识别效果。
课程内容摘要
本周内容连接手机摄像头、ArUco 标记识别与距离测量。手机摄像头提供实时图像流,OpenCV/ArUco 负责在图像中找到标记角点,再结合标记实际尺寸和相机参数估算距离。这个过程让我理解视觉测量不是只看图片,而是需要成像模型、尺度标定和稳定的数据流。README 中记录运行方式、依赖、截图和代码说明,是为了说明实验链路从摄像头输入到识别输出都可以被复现和检查。
学习总结
本周实验把手机、网络、网页和 Python 图像处理连接成了一条完整链路。相比单纯运行本地 OpenCV 脚本,手机摄像头接入更接近真实机器人系统:传感器不一定和计算程序在同一台设备上,网络延迟、图像尺寸、上传频率和识别稳定性都会影响最终效果。这个实验也为 Week 14 的手机遥控和局域网通信项目打下了基础。