第 13 周:四足机器人仿真与强化学习
本仓库整理了 AI Robot 课程第 13 周讲义中的可运行演示代码、步态可视化素材、PPO 强化学习程序和预训练模型。建议学生先 fork 本仓库,再将自己的 fork 作为 Git Submodule 添加到个人作业仓库中。
1. 学生推荐工作流
1.1 Fork 第 13 周代码仓库
在 GitHub 打开:
https://github.com/ai-robot-class/week13
点击 Fork,将仓库复制到自己的账号下,例如:
https://github.com/<your-github-name>/week13
后续如果需要修改第 13 周代码,应提交到自己的 fork,而不是直接修改官方仓库。
1.2 在作业仓库中添加自己的 fork 作为 submodule
进入自己的作业仓库根目录:
cd <student-homework-repo>
添加 submodule:
git submodule add https://github.com/<your-github-name>/week13.git week13
mkdir -p reports results
git add .gitmodules week13 reports results
git commit -m "Add week13 submodule"
推荐作业仓库结构:
student-homework-repo/
├── week13/ # 学生 fork 后的 week13 submodule
├── reports/ # 实验报告、截图说明
├── results/ # 自己生成的视频、模型、GIF
└── README.md # 作业说明
1.3 克隆作业仓库后初始化 submodule
如果换电脑或重新 clone 作业仓库:
git submodule update --init --recursive
也可以 clone 时一次性拉取 submodule:
git clone --recurse-submodules <student-homework-repo-url>
1.4 修改 week13 代码并提交
如果要修改 week13/ 中的代码,需要先进入 submodule:
cd week13
git checkout -b my-week13-experiment
修改代码后,在 week13/ 目录内提交并推送到自己的 fork:
git add quadruped_ppo_residual_stairs.py
git commit -m "Improve week13 stair climbing reward"
git push origin my-week13-experiment
然后回到作业仓库根目录,提交 submodule 指针和作业材料:
cd ..
git add week13 reports results
git commit -m "Submit week13 quadruped experiment"
git push
注意:作业仓库记录的是 week13 submodule 的具体提交指针。只在 submodule 内提交还不够,还需要回到作业仓库提交一次 week13 指针更新。
2. 安装依赖
在作业仓库根目录或 week13/ 目录中运行:
pip install pybullet numpy gymnasium stable-baselines3 torch opencv-python imageio matplotlib pillow
3. 快速复现最终强化学习演示
在作业仓库根目录运行:
python3 week13/quadruped_ppo_residual_stairs.py demo --task stairs --model week13/ppo_residual_stairs.zip --stair_steps 4 --step_height 0.03 --init_x 0.00 --steps 500 --gui
无图形界面时录制视频:
python3 week13/quadruped_ppo_residual_stairs.py demo --task stairs --model week13/ppo_residual_stairs.zip --stair_steps 4 --step_height 0.03 --init_x 0.00 --steps 500 --record results/stairs_demo.mp4
预期现象:四足机器人能够明显向前爬上约三阶低台阶,但尚未满足“在最终台阶上稳定站住”的严格成功标准。
4. 第 13 周演示代码
4.1 PyBullet 入门:方块自由落体
python3 week13/demos/01_pybullet_box.py
对应讲义:PyBullet 基础仿真示例。
4.2 加载 Laikago 四足机器人
python3 week13/demos/02_load_laikago.py
对应讲义:加载 PyBullet 自带四足机器人模型。
4.3 简单正弦步态
python3 week13/demos/03_sine_gait.py
对应讲义:用正弦函数控制关节,观察对角腿相位差。
4.4 Trot 步态演示
python3 week13/demos/04_trot_gait.py
对应讲义:更清晰的 Trot 步态生成。
4.5 生成步态 GIF 与图表
python3 week13/scripts/generate_gait_gifs.py
python3 week13/scripts/generate_gait_diagrams.py
生成结果保存在:
week13/assets/gaits/
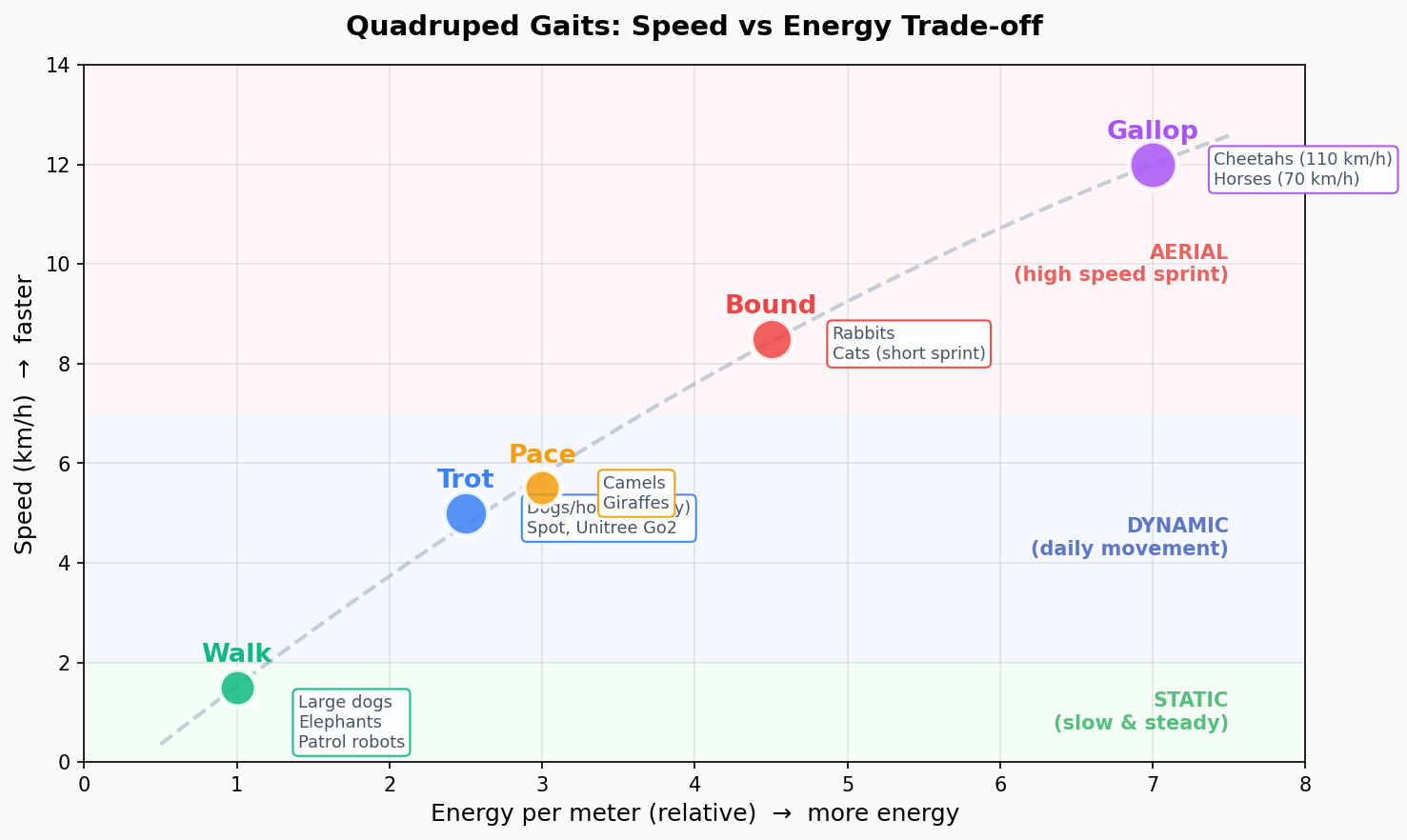
5. 步态可视化素材
三种步态对比:
Trot 步态:
步态相位图:

速度与能耗对比:
6. 强化学习代码与模型
week13/
├── quadruped_ppo_residual_stairs.py # PPO + residual controller 主程序
├── ppo_run_flat.zip # 平地跑步预训练模型
├── ppo_residual_stairs.zip # 低台阶预训练模型
├── demos/ # PyBullet 与步态演示代码
├── scripts/ # GIF / 图表生成脚本
└── assets/ # README 与讲义使用的可视化素材
平地跑步演示:
python3 week13/quadruped_ppo_residual_stairs.py demo --task run --model week13/ppo_run_flat.zip --steps 500 --gui
从低台阶预训练模型继续训练:
python3 week13/quadruped_ppo_residual_stairs.py train \
--task stairs \
--load_model week13/ppo_residual_stairs.zip \
--timesteps 300000 \
--num_envs 8 \
--batch_size 2048 \
--curriculum \
--model results/my_stairs_policy.zip
录制自己的策略:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task stairs \
--model results/my_stairs_policy.zip \
--stair_steps 4 \
--step_height 0.03 \
--init_x 0.00 \
--steps 500 \
--record results/my_stairs_demo.mp4
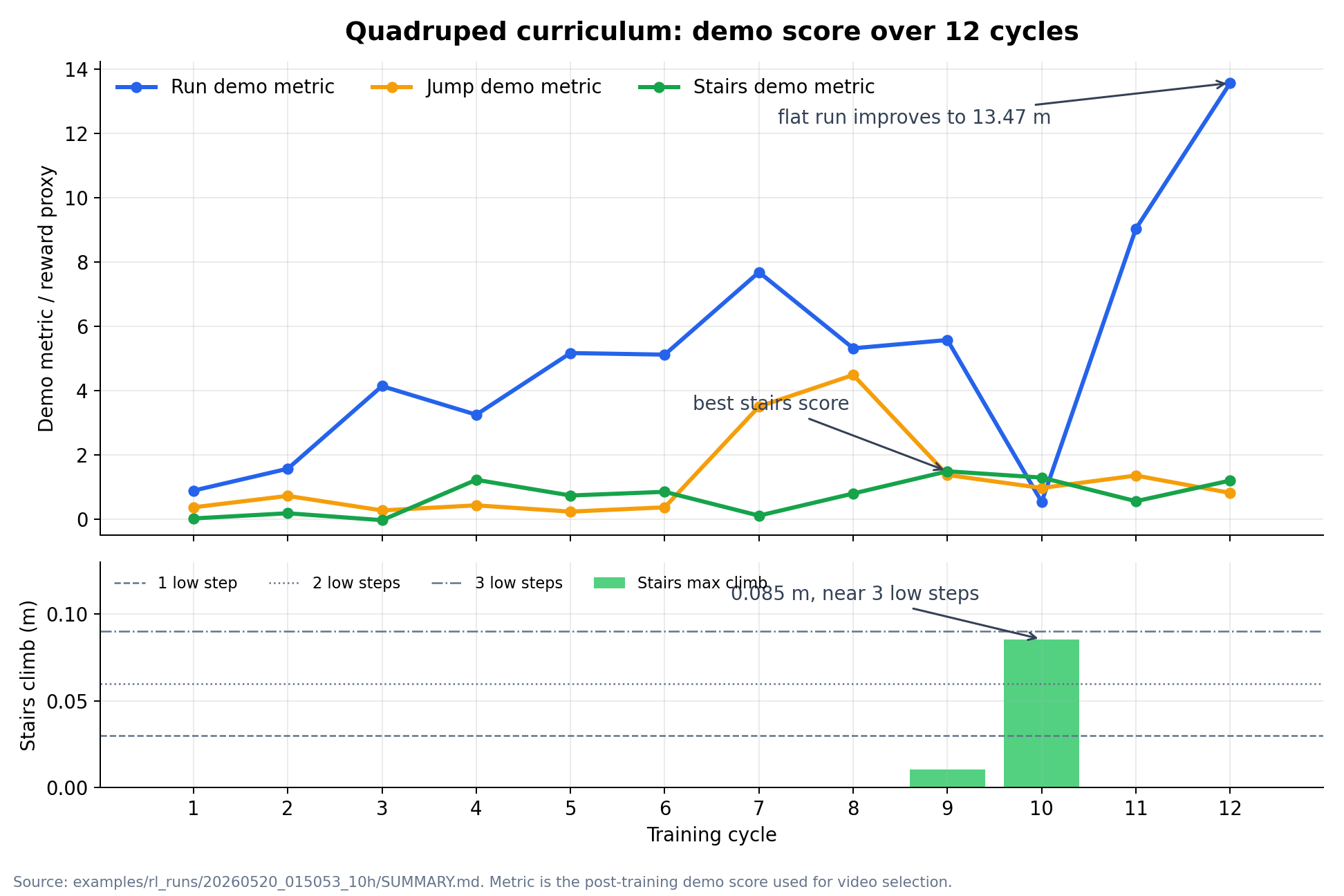
训练指标参考:
7. 作业报告建议
建议在 reports/week13_report.md 中记录:
# Week 13 四足机器人仿真与强化学习实验报告
## 运行的演示
- PyBullet 方块自由落体:
- Laikago 加载:
- 正弦步态:
- Trot 步态:
- PPO 爬楼梯:
## 修改内容
- 修改的文件:
- 修改的奖励项或参数:
- 修改原因:
## 实验结果
- 模型文件:
- 视频文件:
- 最明显的进步:
- 仍然存在的问题:
## 反思
- 策略是否出现投机行为?
- 成功判定是否合理?
- 下一步如何改进?
提交作业:
git add reports results week13
git commit -m "Submit week13 quadruped simulation assignment"
git push
8. 成功判定标准
本任务中,“成功”不等同于腿部高度超过台阶,也不等同于机身短暂冲上台阶。严格成功需要同时满足:
- 机身中心到达最终台阶区域
- 机身保持直立
- 至少两只脚趾稳定接触最终台阶
- 身体、大腿、小腿不能作为支撑卡在台阶上
- 线速度和角速度足够小
- 连续稳定保持一段时间
当前 ppo_residual_stairs.zip 展示了训练带来的显著阶段性进步:机器人可以爬上约三阶低台阶;但该策略尚未达到上述严格成功标准。
9. 常见问题
week13/ 目录为空
说明 submodule 尚未初始化:
git submodule update --init --recursive
修改了 week13/,但作业仓库没有记录具体文件变化
这是 submodule 的正常行为。应先在 week13/ 仓库内部提交修改,再回到作业仓库提交 submodule 指针。
无法打开显示窗口
使用 --record 参数录制视频,并省略 --gui。
训练速度较慢
PyBullet 使用 CPU 物理仿真,无法像 Isaac Gym / Isaac Lab 一样进行大规模 GPU 并行仿真。本仓库更适合教学演示、奖励函数调试和小规模实验。
English Summary
This repository contains runnable Week 13 simulation demos, gait visualizations, PPO residual stair-climbing code, and pretrained models. Students are encouraged to fork this repository, add their fork as a Git submodule in their homework repository, modify their fork, and submit both the submodule pointer and experiment report.