Week 2:WSL、Ubuntu 与 ROS2 环境配置
本周主要完成 AI 机器人课程的基础开发环境搭建。机器人课程后续会频繁使用 Linux 命令行、Python、ROS2 和 turtlesim,因此 Week 2 的重点是让电脑具备可运行 ROS2 实验的基础条件,并确认常用工具可以正常启动。
实验内容
- 在 Windows 中启用 WSL,并安装 Ubuntu 22.04。
- 熟悉 Ubuntu 终端的基本操作,例如
pwd、ls、cd、mkdir和python3 --version。 - 安装或检查 ROS2 Humble 环境。
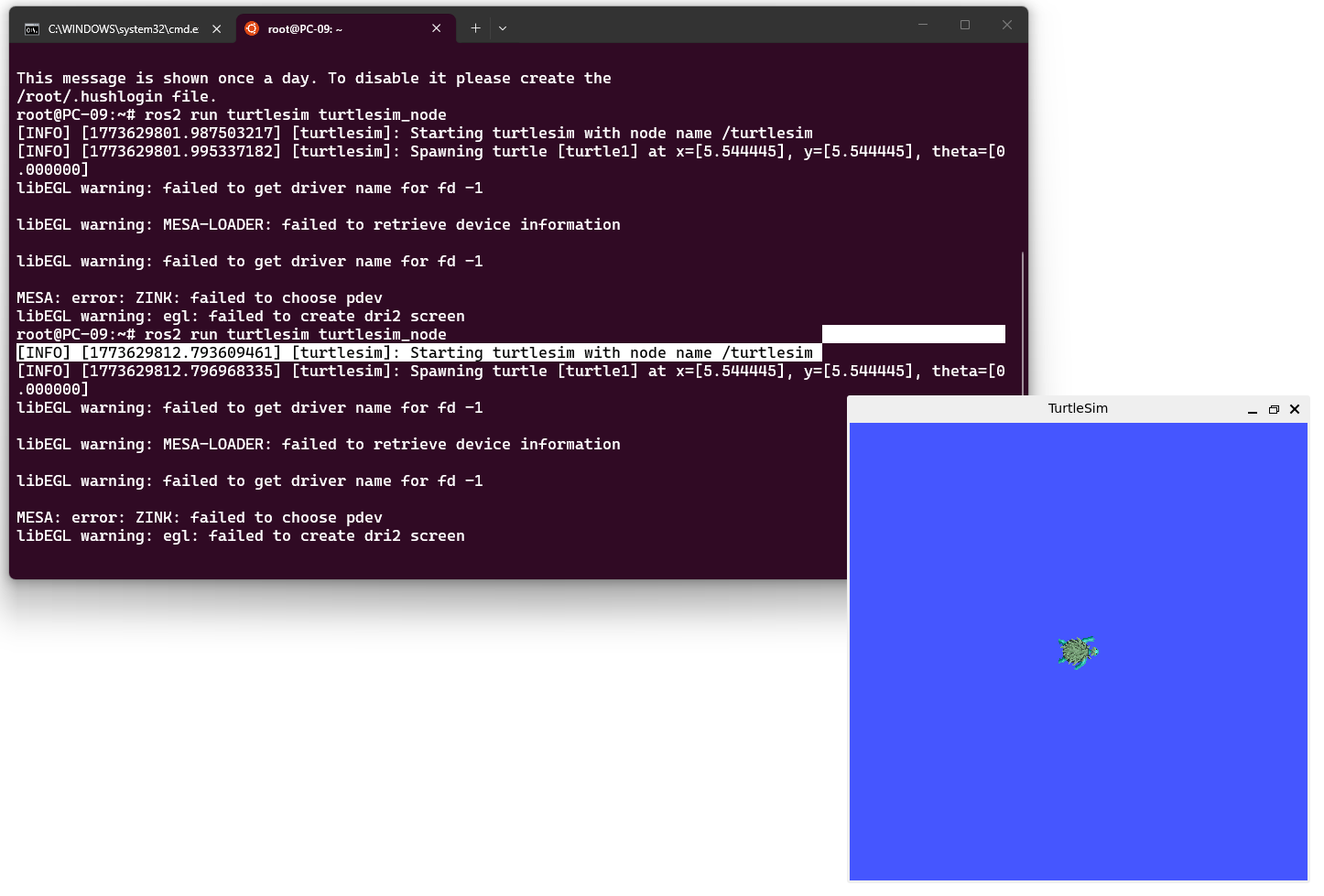
- 运行 turtlesim,确认图形界面和 ROS2 命令可以正常使用。
- 整理环境截图和检查脚本,为后续课程实验做准备。
关键命令
wsl --install
lsb_release -a
python3 --version
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtlesim_node
为了避免每次打开终端都手动 source ROS2,可以把下面这行加入 ~/.bashrc:
source /opt/ros/humble/setup.bash
代码说明
本周补充了 week2_environment_check.py,用于检查系统平台、Python 版本以及 ros2、turtlesim_node 等命令是否能在当前环境中找到。
运行方式:
python3 week2_environment_check.py
运行截图
课程内容摘要
本周课程对应环境配置入门,核心不是单纯安装软件,而是建立后续机器人实验的统一工作台。WSL 让 Windows 用户可以使用接近真实 Linux 服务器的命令行环境,Ubuntu 22.04 与 ROS2 Humble 的组合也方便后续运行 turtlesim、Python 节点和图形化仿真。整理作业时,我把重点放在三个可复现证据上:系统版本、Python 与 ROS2 命令、turtlesim 启动截图。这样即使换电脑或重新安装,也能按 README 中的步骤快速定位问题。
学习总结
Week 2 的任务虽然还没有写复杂代码,但它决定了后续实验能不能顺利进行。我学会了在 WSL 中使用 Ubuntu,理解了 Windows 和 Linux 子系统之间的关系,也第一次运行了 ROS2 的 turtlesim 示例。通过这个过程,我认识到机器人开发通常依赖一套稳定的系统环境,环境配置本身就是工程能力的一部分。