Week 3:GitHub SSH、VS Code 与 ROS2 命令行交互
本周在 Week 2 的环境基础上继续练习开发工具链。主要内容包括 GitHub SSH 配置、VS Code 连接 WSL、Git 基本提交流程,以及 ROS2 命令行对 turtlesim 的控制和观察。目标是让代码编辑、版本管理和 ROS2 调试形成一个顺畅的工作流程。
实验内容
- 配置 GitHub SSH key,确认本地仓库可以通过 SSH 推送到 GitHub。
- 使用 VS Code 打开 WSL 中的课程作业目录。
- 学习
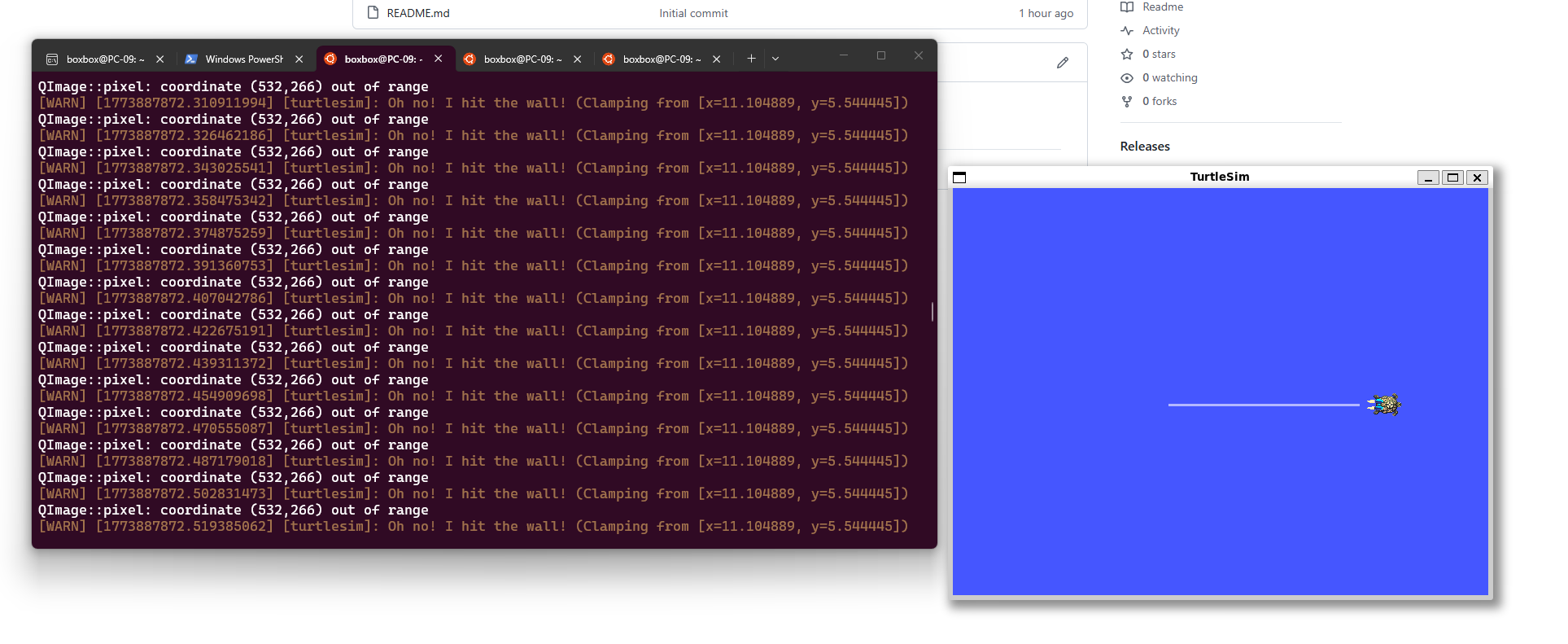
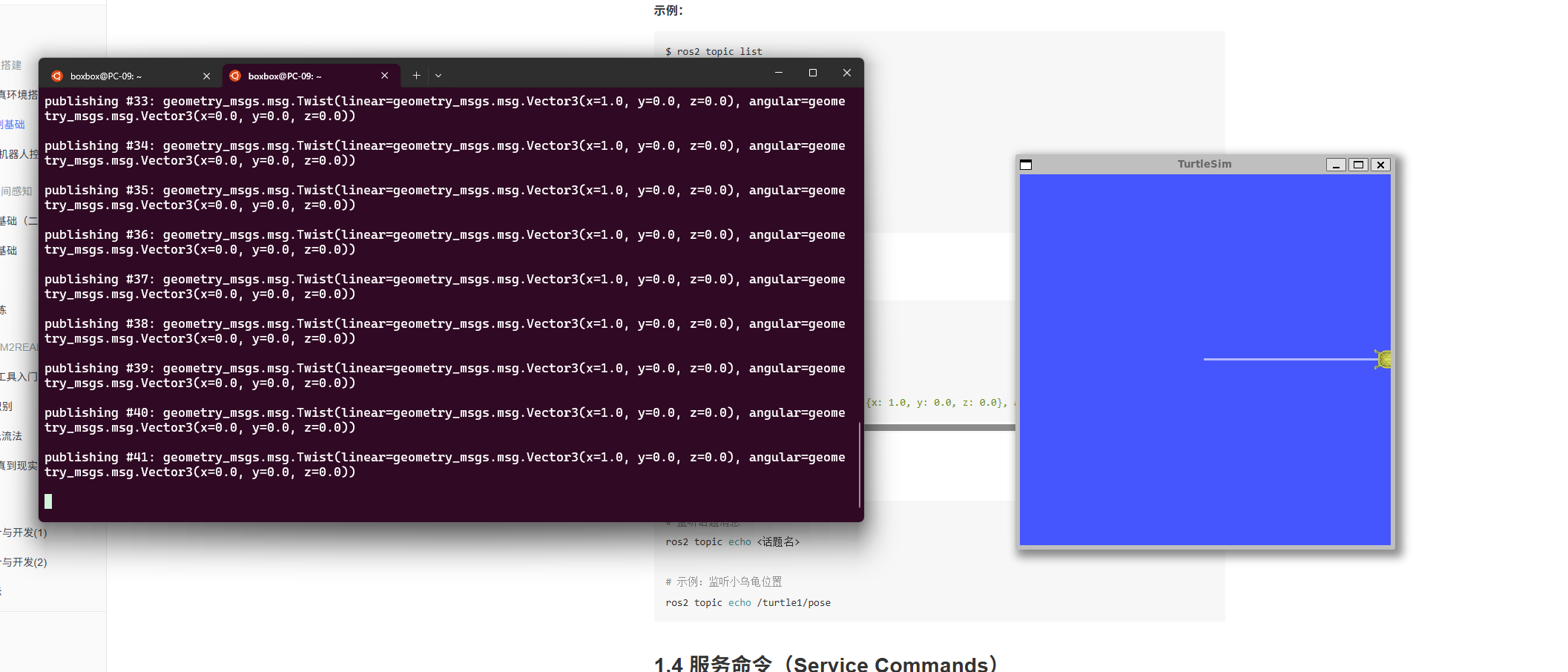
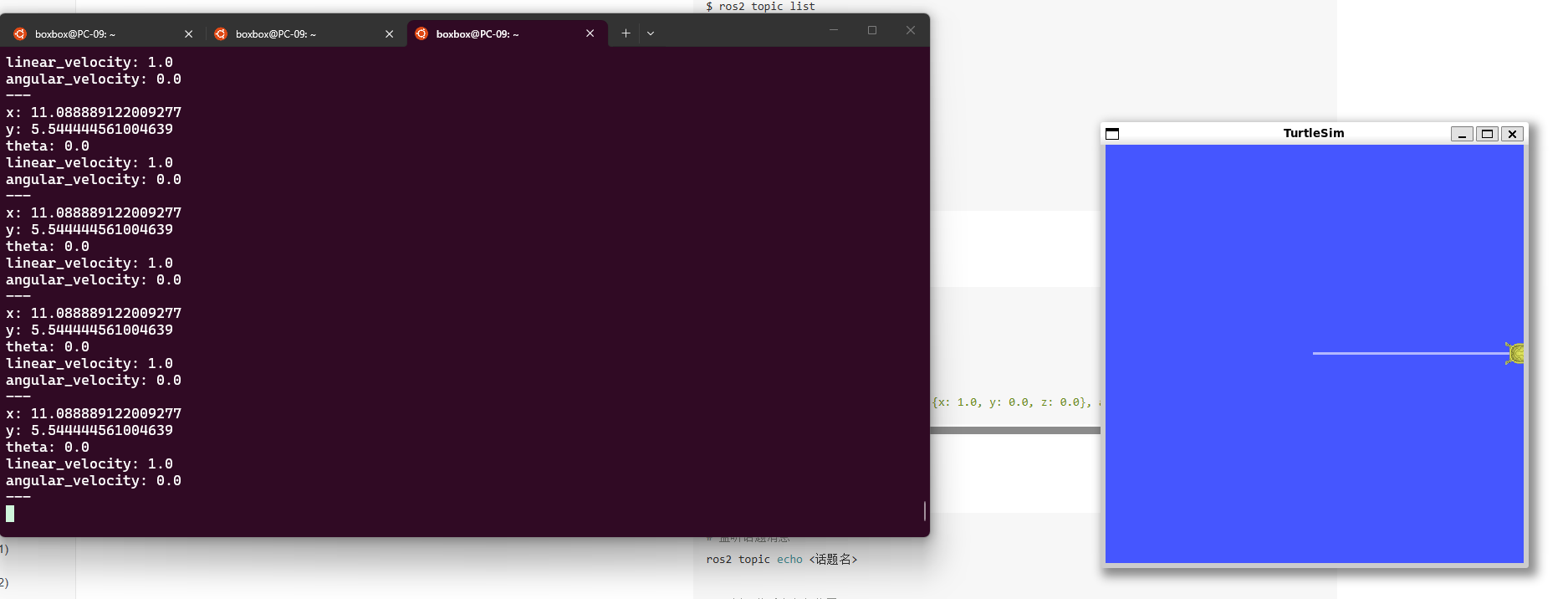
git status、git add、git commit、git push的基本用法。 - 启动 turtlesim,并通过 ROS2 命令查看节点、话题和位姿数据。
- 记录乌龟移动效果和命令行输出截图。
常用命令
ssh-keygen -t ed25519 -C "your_email@example.com"
cat ~/.ssh/id_ed25519.pub
git status
git add .
git commit -m "update week3 homework"
git push
ROS2 相关命令:
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtlesim_node
ros2 topic list
ros2 topic echo /turtle1/pose
代码说明
week3_git_ros_notes.py 记录了本周最常用的一组 Git 与 ROS2 命令。运行它可以快速回顾本周练习内容:
python3 week3_git_ros_notes.py
运行截图
课程内容摘要
本周从“能运行环境”推进到“能管理代码和远程协作”。SSH 密钥解决的是本机与 GitHub 之间的可信连接,VS Code 解决的是在 WSL 中编辑、运行和提交代码的效率问题,ROS2 命令行练习则帮助我理解节点、话题、消息之间的关系。作业整理时,我把命令记录、截图和检查脚本放在同一目录中,目的是让一次实验既能被自己复盘,也能被评分系统和老师快速查看。
学习总结
本周我把 GitHub、VS Code 和 ROS2 命令行连接到同一个开发流程里。以后做机器人项目时,不只是要能运行程序,还要能保存代码、同步仓库、观察运行状态和定位问题。通过 turtlesim 的话题监听,我第一次直观理解了 ROS2 中“节点发布消息、另一个终端订阅消息”的工作方式。