Week 5:Linux 目录操作与机器人运动学
本周学习 Linux 文件目录操作,并结合机器人运动学练习 Python 编程。课程内容从命令行文件管理扩展到机器人控制脚本:一方面要能在终端中清楚地组织代码和素材,另一方面要理解机器人关节、坐标和运动轨迹之间的关系。
实验内容
- 练习 Linux 常用文件命令:
pwd、ls、cd、mkdir、cp、mv、rm。 - 整理课程作业目录,区分 README、图片、代码和视频文件。
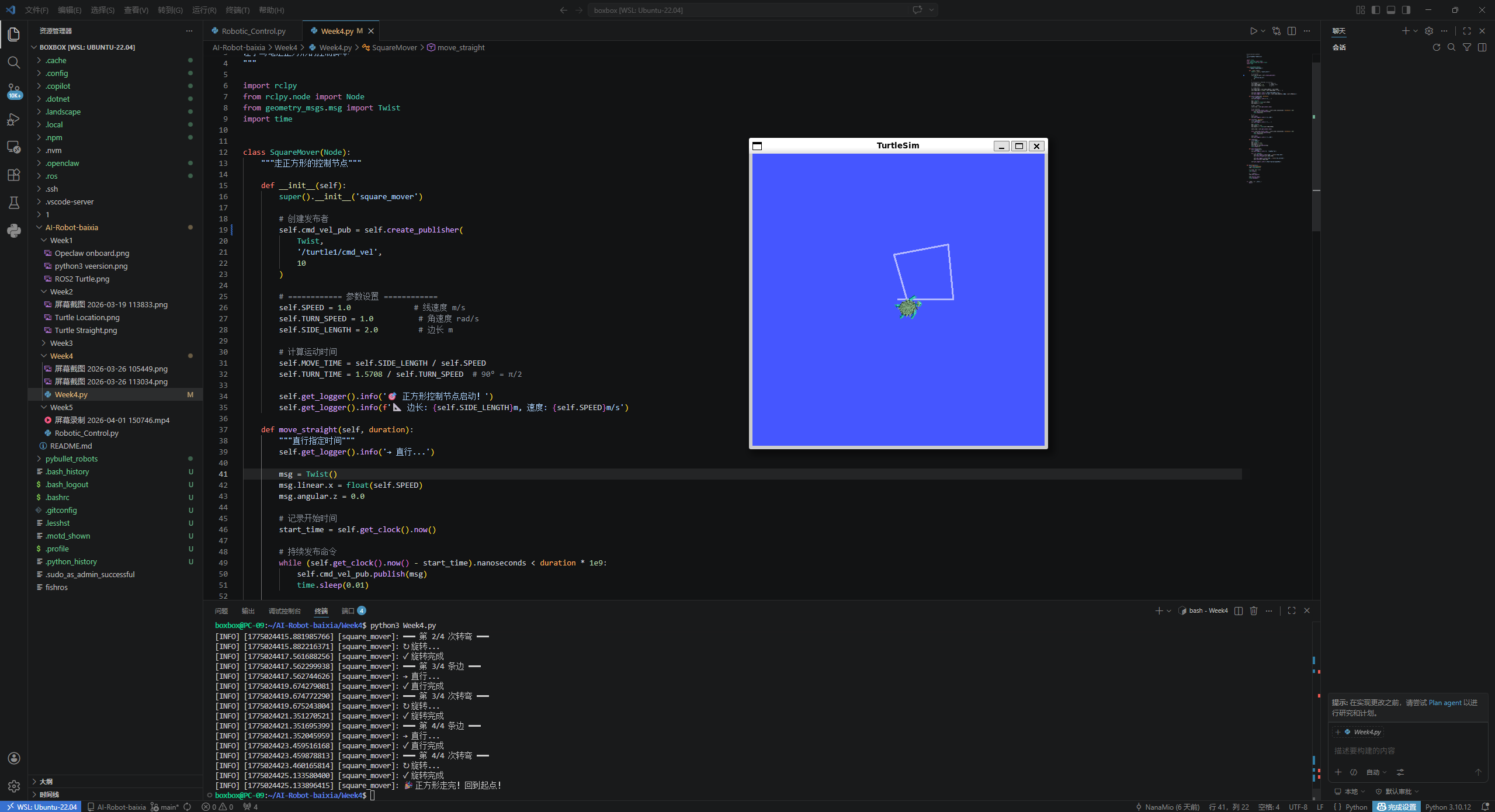
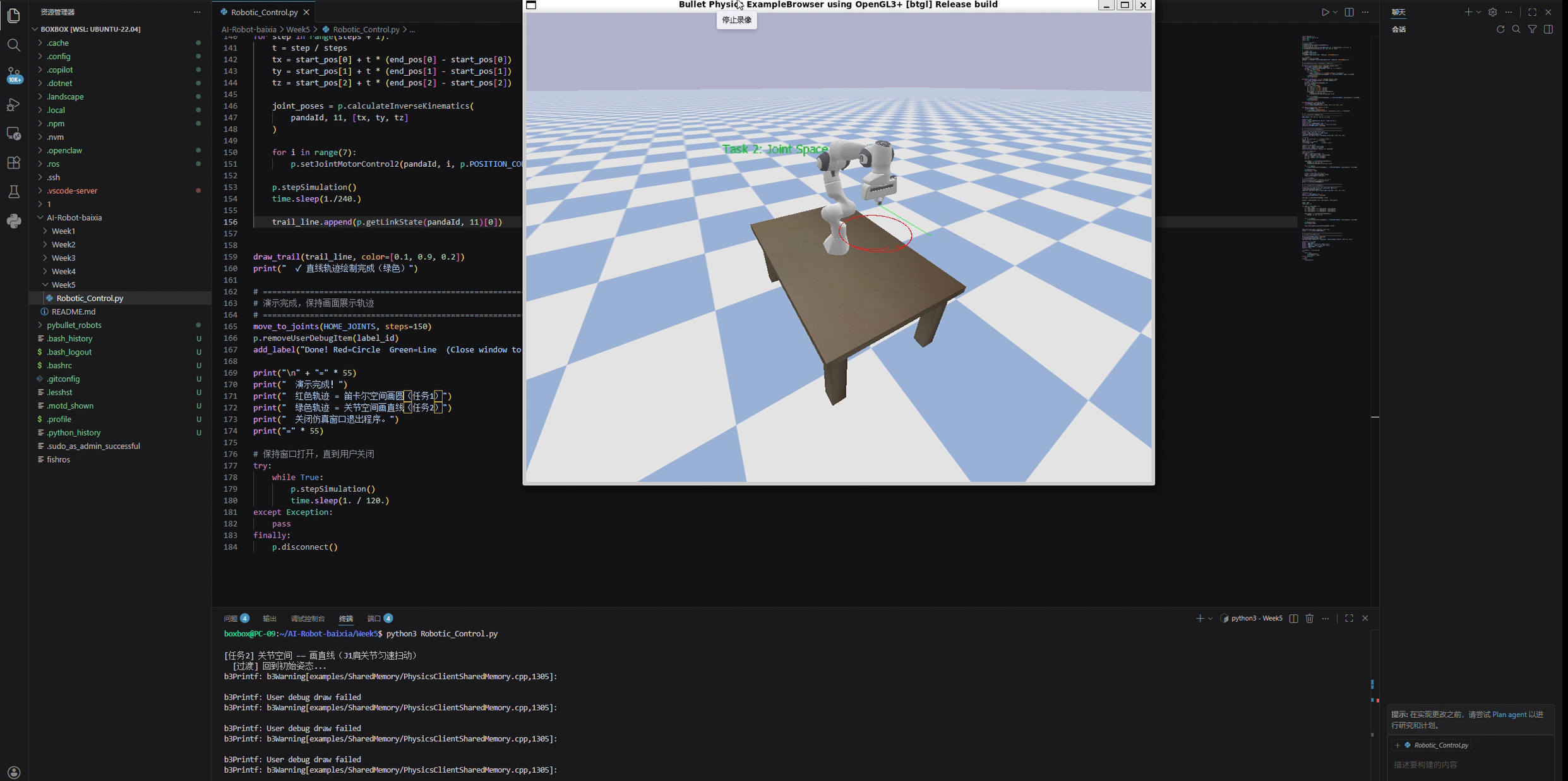
- 编写 Python 脚本控制 turtlesim 或模拟机器人运动。
- 初步理解机械臂或移动机器人的运动学概念。
文件说明
Week5.py:本周 Python 练习脚本。Robotic_Control.py:机器人控制相关示例代码。video5-1.mp4:运行或演示视频。img5-1.png、img5-2.png:实验截图。
运行方式
python3 Week5.py
python3 Robotic_Control.py
如果脚本依赖 ROS2 或图形仿真,需要先启动对应环境:
source /opt/ros/humble/setup.bash
运行截图
演示视频
本周演示视频记录了截图对应的环境、命令或实验效果,便于在 GitHub Pages 中和截图一起检查作业完成情况。
课程内容摘要
本周把 Linux 目录操作与机器人运动学结合起来。目录操作部分训练的是工程项目组织能力,例如如何用 mkdir、cp、mv、rm、相对路径和绝对路径管理实验文件;运动学部分则继续关注机器人如何把速度指令转换成位置变化。相比 Week4 的基础坐标理解,本周更强调“把程序放在正确位置、用正确命令运行、输出可检查结果”。我在 README 中记录运行方式、代码文件和截图,是为了让作业目录本身成为一个可复现的小实验包。
学习总结
本周让我意识到目录结构和代码同样重要。机器人实验通常会产生脚本、截图、视频、模型文件和说明文档,如果没有清楚的文件组织,后续复现实验会很困难。运动学部分则让我开始理解机器人动作背后的数学关系:控制指令会改变位姿,多个关节或多个速度分量组合后才形成完整运动。