Week 6:传感器介绍与 ROS2 KITTI 实验
本周学习机器人常见传感器和数据格式,包括激光雷达、相机图像、点云和自动驾驶数据集。课程通过 ROS2 与 KITTI 相关示例,让我理解机器人不仅需要运动控制,也需要从传感器中获取环境信息。
学习目标
- 了解激光雷达 LaserScan 数据的基本含义。
- 了解相机图像在机器人感知中的作用。
- 理解传感器数据通常通过 ROS2 topic 发布和订阅。
- 认识 KITTI 数据集在自动驾驶和机器人视觉研究中的用途。
代码说明
week6_sensor_summary.py 是一个小型传感器数据统计脚本。它模拟对激光雷达距离数组进行过滤,并输出有效数据数量、最小距离和最大距离。
运行方式:
python3 week6_sensor_summary.py
示例输出:
{'count': 4, 'min': 0.9, 'max': 2.4}
运行截图
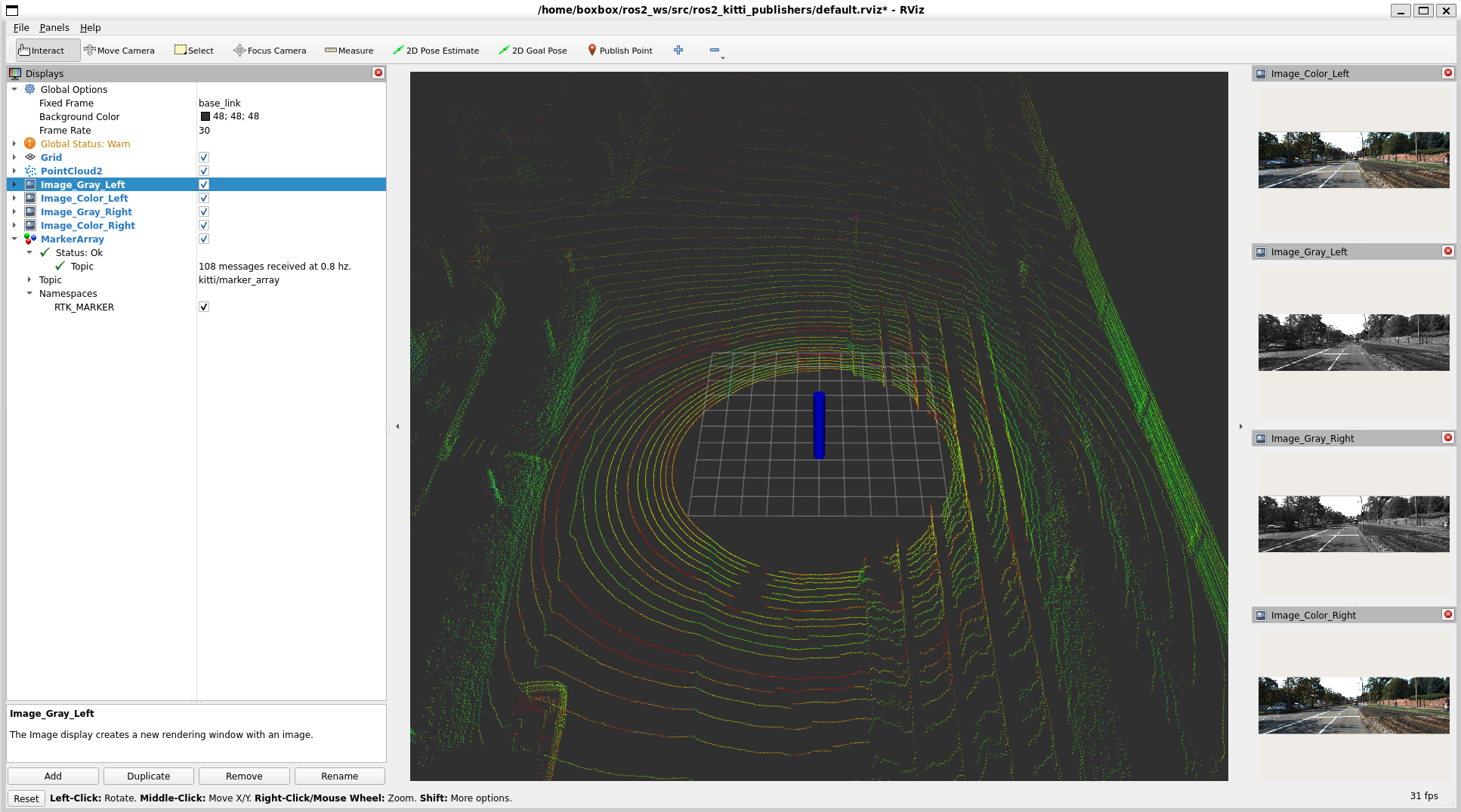
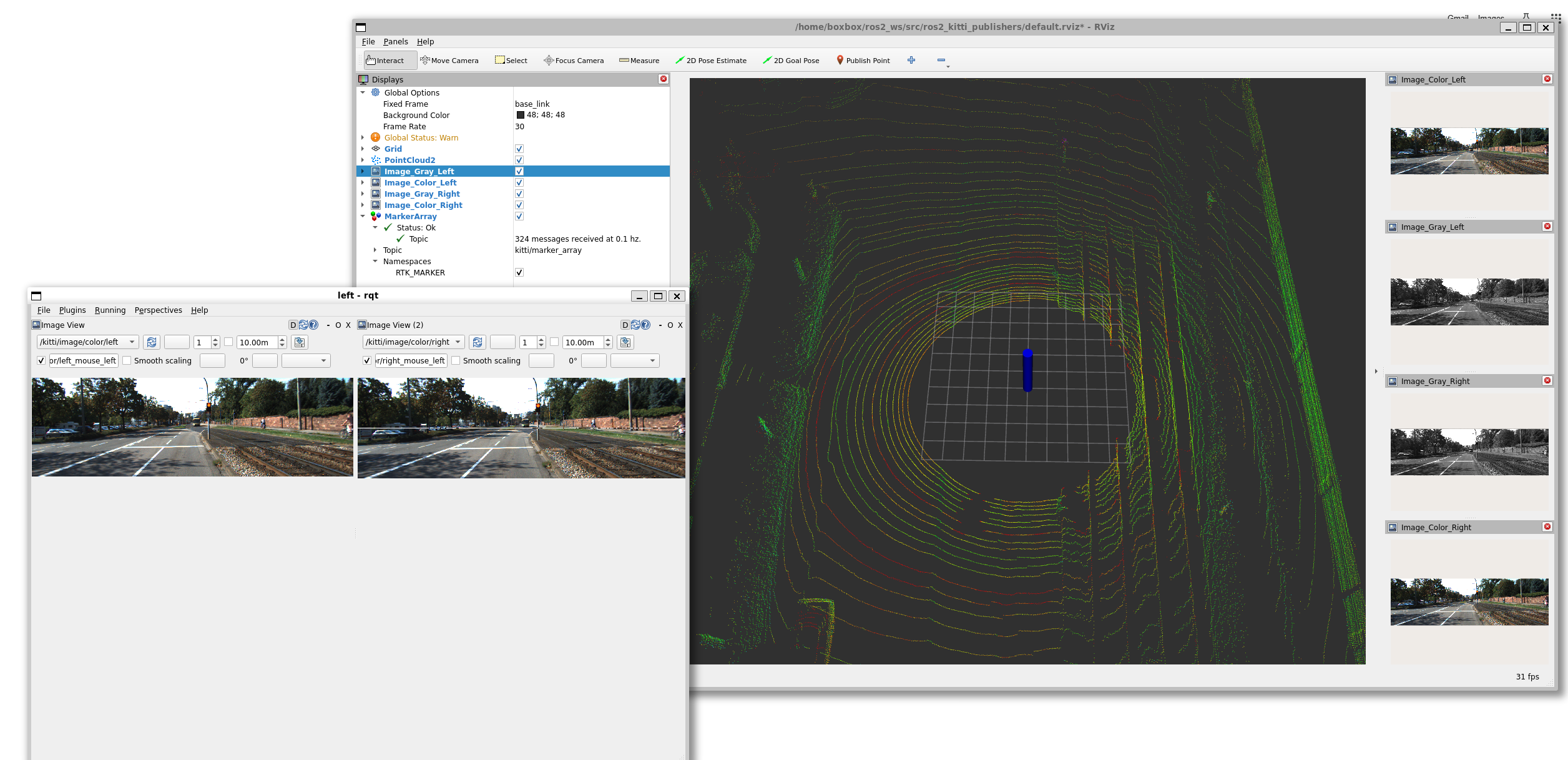
课程内容摘要
本周围绕传感器与闭环控制展开。机器人如果只有预设速度,就只能开环运动;加入传感器反馈后,程序可以根据环境状态调整动作,例如发现障碍物后减速、转向或重新规划。课程中的 KITTI/传感器主题让我认识到图像、雷达、位姿等数据并不是孤立文件,而是控制逻辑的输入。作业中的脚本用于整理传感器实验理解,截图展示运行或资料整理结果,演示视频则把本周实验证据集中呈现,方便后续回看。
学习总结
通过 Week 6,我认识到传感器数据是机器人理解世界的基础。激光雷达可以提供周围障碍物距离,相机可以提供颜色、纹理和目标信息,而这些数据都需要通过程序进行解析和处理。后续 Week 10 的 OpenCV 实验和 Week 12 的手机摄像头测距,都建立在本周对传感器数据的初步认识之上。