Week 8:Docker 安装与 ROS2 桌面容器
本周学习 Docker 的基础概念,并使用 ROS2 桌面容器运行图形化机器人实验。Docker 可以把复杂的软件环境打包起来,减少不同电脑之间配置不一致的问题。对于 ROS2、PyBullet、OpenCV 这类依赖较多的机器人实验,容器环境非常实用。
实验内容
- 安装 Docker Desktop 或 Linux Docker 环境。
- 拉取并运行 ROS2 桌面 VNC 镜像。
- 通过浏览器访问 noVNC 桌面。
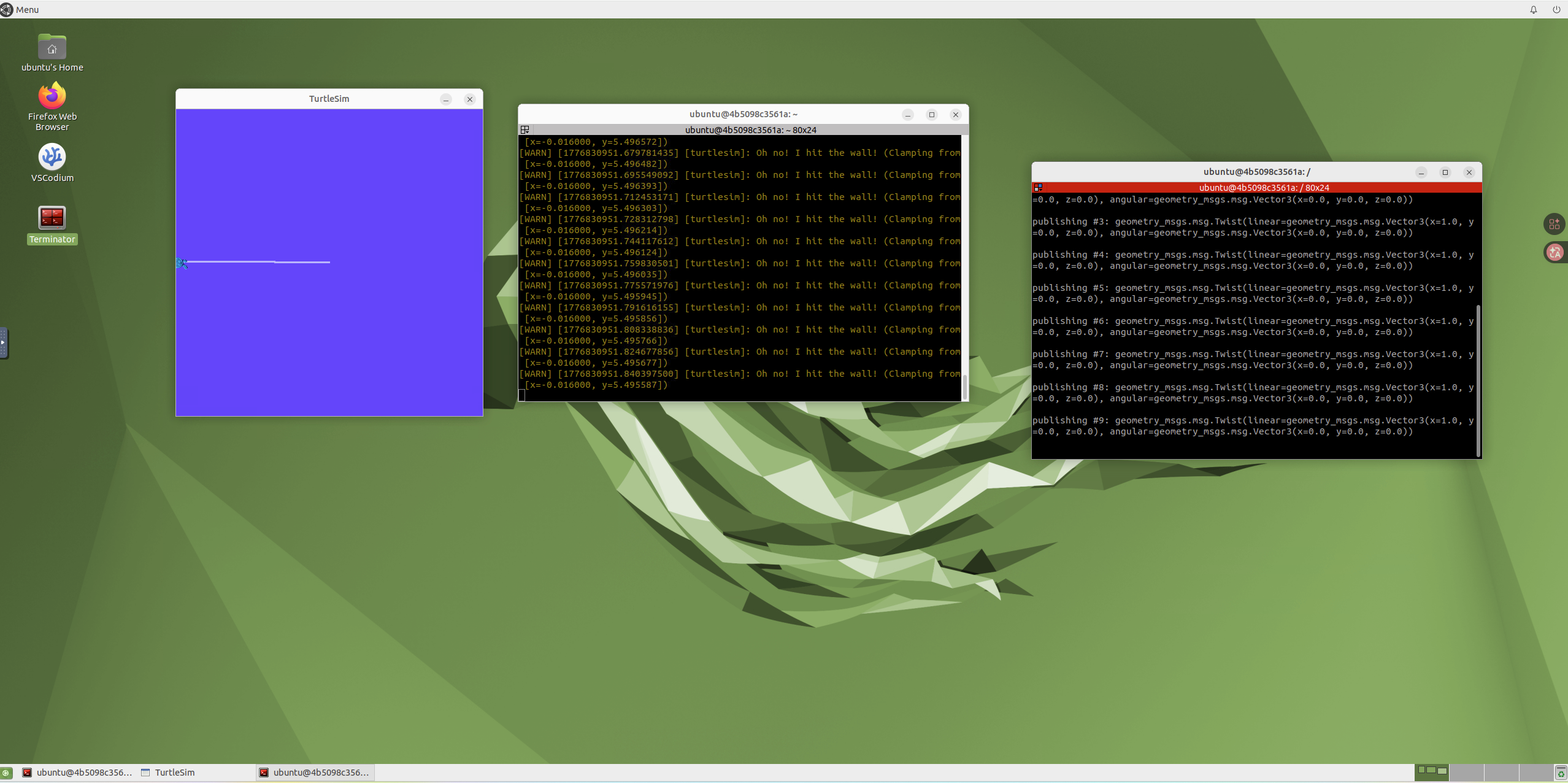
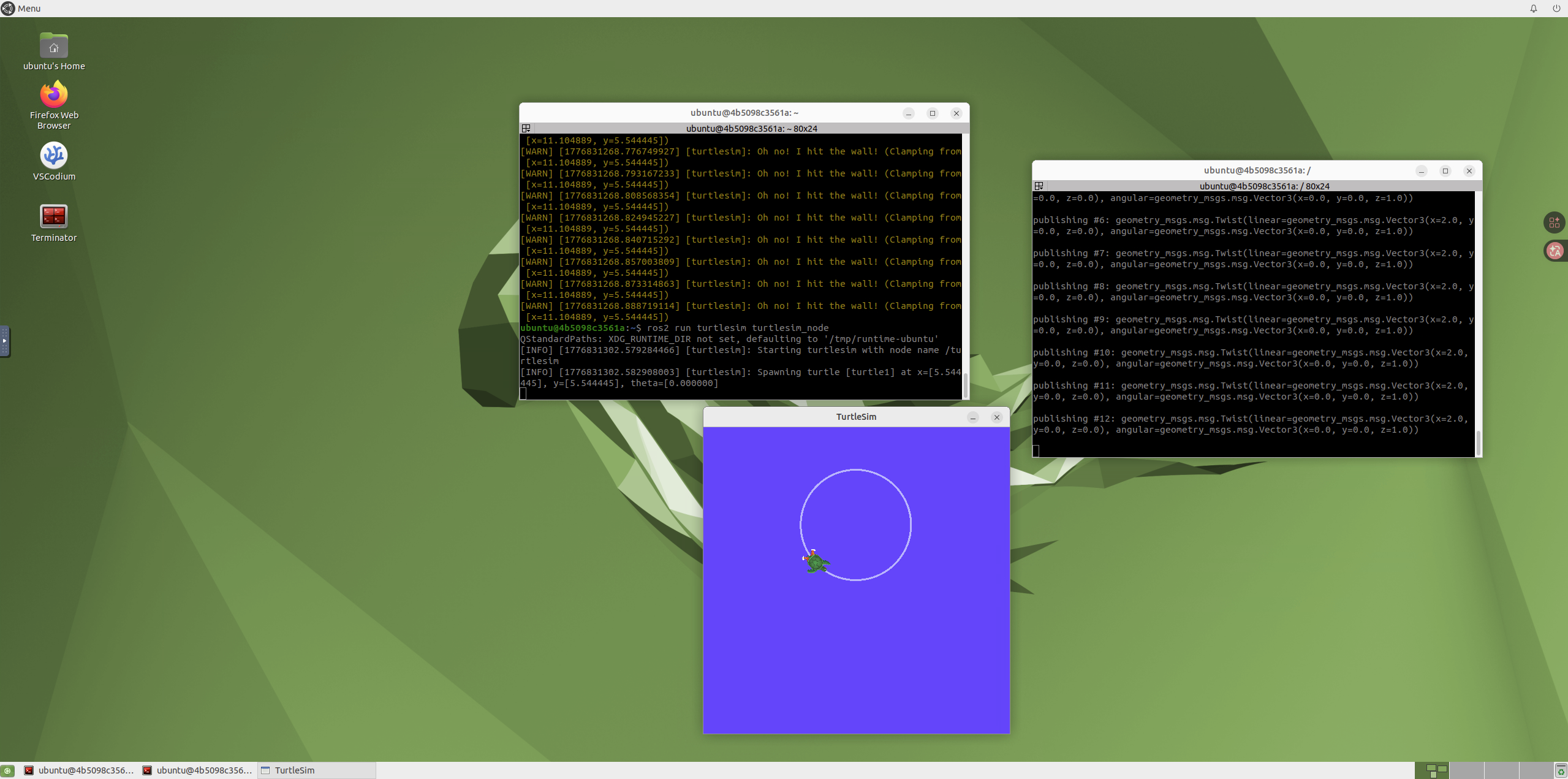
- 在容器中运行 ROS2 或 turtlesim 示例。
- 记录容器启动、桌面访问和实验运行截图。
常用命令
docker pull ghcr.io/tiryoh/ros2-desktop-vnc:humble
docker run -p 6080:80 --security-opt seccomp=unconfined --shm-size=512m ghcr.io/tiryoh/ros2-desktop-vnc:humble
docker ps
docker stop <container_id>
浏览器访问:
http://localhost:6080
代码说明
week8_docker_commands.py 汇总了本周最常用的 Docker 命令和 noVNC 访问地址。运行方式:
python3 week8_docker_commands.py
运行截图
课程内容摘要
本周重点是 Docker 与 ROS2 桌面容器。Docker 的意义在于把依赖、系统版本和运行命令封装到容器中,减少“我这里能跑、别人那里不能跑”的问题。ROS2 图形界面对网络、显示和权限都有要求,因此用容器统一环境非常适合教学实验。README 中记录镜像、容器启动和常用命令,是为了把环境搭建从一次性操作变成可重复流程,也为后续 OpenCV、网页部署和项目演示打基础。
学习总结
Docker 让我理解了“环境也是项目的一部分”。以前运行程序时,很多问题来自 Python 版本、系统依赖或图形界面配置不一致;使用容器后,可以把课程需要的软件环境固定下来。后续 Week 10、Week 11 和 Week 14 的实验都可以继续利用这个思路,在同一个容器环境中运行机器人仿真和网页服务。